 010-56381676
010-56381676 customer-service@zttledu.com
customer-service@zttledu.com


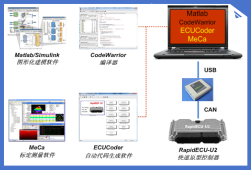
平台由控制器硬件、基于Simulink的自动代码编辑软件(包含基础软件模块库)、测量标定软件三部分组成。通过自动代码编辑软件,建立控制算法模型,并将建模与仿真所形成的控制算法模型下载到控制器硬件中,可一键完成代码生成,进行在环仿真调试,并通过测量标定软件实时在线标定。适用于纯电动汽车VCU系统等项目的教学、创新开发。
一、支持如下功能
1.整车驱动控制,基于扭矩为核心的整车驱动控制算法根据驾驶员需求及车辆状态等向电机控制器发出控制指令,以满足车辆的驾驶工况。
2.整车能量管理,通过对电动汽车的电机驱动系统、电池、传动系统以及其它车载能源动力系统的协调和管理,以获得******的上下电策略与能量利用率。
3.整车状态监控与显示,控制器通过传感器和CAN总线,检测车辆状态及其各子系统状态信息,驱动显示仪表,将状态信息和故障诊断信息经过显示仪表显示出来。显示内容包括:车速,里程,电机的转速、温度,电池的电量、电压、电流,故障信息等。
4.制动优先,对于驾驶员需求指令的处理,汽车制动需求优先于加速需求,即制动踏板位置信号处理优先级高于加速踏板位置信号处理优先级,以保证安全性。
5.制动能量回收,电动汽车制动能量回收要求实现提高整车的能量回收率以及优化驾驶员感受,为回收尽可能多的动能,必须控制牵引电动机产生特定量的制动力。
6.整车故障诊断,故障诊断是整车控制器实时系统的关键性安全保护措施。检测故障,进行故障处理,进而执行车辆动力系统的降级、跛行以及关断等操作模式。
7.车辆附件控制,包括真空泵控制,DCDC控制,空调控制,冷却风扇控制,冷却水泵控制等,以实现完整的车辆附件控制功能。
8.车辆起步控制,通过优化起步控制算法得到合适的起步扭矩,实现车辆平地、上坡、下坡等路况下平稳起步。
9.车速限制,为保证车速不超过安全限值,当车速超过一定值时限制电机的输出扭矩,在某些工况下还可以利用电机制动来进一步限制车速。
10.电机转速限制,保证电机转速不超过安全限值,当电机转速超过一定值时限制电机的输出扭矩。
二、主要组成及配置:
1、1*ECU控制器。
2、1*全自动代码编辑软件。
3、1*程序调试标定软件。
4、1*USBCANII通信适配器。
5、1*121pin U2专用开发线束。
6、1*CAN转接头。
7、1*BootKey激活器。
8、1*软件光盘。
9、1*USBKEY软件加密狗。
10、1*C编译器。
11、提供使用说明书1套。
三、控制器资源配置
MCU:MPC5554,主频80MHz,FLASH 2MB,SRAM 64KB
CAN:4路高速CAN
LIN:1路
系统供电电压:9~32V
传感器供电输出:2路5V传感器供电,1路0~5V,1路0~10V,可编程电源。
模拟量输入:9路0-5V输入,6路0~28V输入,6路无源传感器输入,内部电源检测
开关量输入:10路高有效,2路低有效,8路高低
频率量输入:8路霍尔式信号输入,8路磁电式信号输入
模拟量输出:2路,0~10V
并行控制高端PWM:4路,2.9A(2)
并行控制低端PWM:8路,1.8A(2)
并行控制低端开关:最多17路
四、自动代码编辑软件
1.主要功能
(1)通过自动代码编辑软件,建立控制算法模型,并将控制算法模型下载到控制器中,可一键完成代码生成,在环仿真调试,实时在线标定。
(2)控制器核心采用主流芯片(MPC5554)集成信号调理与功率驱动电路,具有丰富的I/O、A/D、模拟量、开关量、频率量PWM、CAN、继电器等接口。
(3)可对ECU内部数据采集监控,提供曲线示波器、温度计、转速表、数字液晶、指示灯。
(4)可对ECU实时标定,访问修改RAM/FLASH数据实时在线标定,提供标定控件。
(5)可刷写ECU,一键完成ECU代码刷写和更新,通过握手程序保证代码刷写准确性。
(6)可存储数据与分析:存储功能可将测量数据存储在上位机,以CSV等数据格式保存。
2.提供基础软件Simulink模块库
(1)底层驱动
(2)标定协议
(3)引导加载程序
(4)实时操作系统
(5)通信协议栈
(6)诊断协议栈
